Новости

SOLIVENT PRO - новые фильтрующие вентиляторы от Seifert
SOLIVENT PRO - эффективное решение для климат-контроля промышленных шкафов. Защищает оборудование от перегрева и загрязнения.

Lovato - новых реле времени RTC и TMAST
Два новых реле времени разработаны для точного и гибкого управления автоматикой в бытовых, коммерческих и промышленных установках. Сочетают в себе компактность, прочность и гибкость с высокой простотой использования, обеспеченной конфигурацией через NFC и мобильное приложение.

Технологические тренды: Силовые модули из карбида кремния SiC
Полупроводники играют ключевую роль в современной электронике и автоматизации, являясь основой для создания множества устройств и систем. Хотя кремний остается основным материалом, исследуются альтернативы, такие как карбид кремния (SiC). На сегодняшний день завоевывает позиции ведущего полупроводника для приложений высокой мощности.

Schmersal представила новые концевые выключатели положения с вращающейся головой актуатора
Новые концевые выключатели положения с отдельным актуатором от компании Schmersal: AZ215/AZ216 и AZ315/AZ316. Их отличительной особенностью является вращающаяся голова актуатора из цинка, которую можно легко поворачивать на 90°. Это дает возможность устанавливать акуатор в четырех разных направлениях, а также сверху.
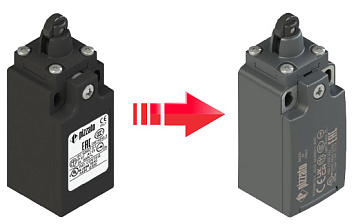
Pizzato меняет стиль концевых выключателей положений
Серии FR, FM, FK, FX, FT и FW изменят свой визуальный стиль. Помимо этого продукция устанавливается быстрее и предлагает улучшенную работу и настройку.

Компания Spelsberg представила новые распределительные коробки серии Abox и Abox Pro.
Линейка распределительных коробок Abox от Spelsberg - это проверенный временем выбор, всегда обеспечивающий безопасное и надежное электрическое соединение. Новое поколение оснащено впечатляющими инновационными функциями для еще более быстрой и эффективной установки, а также обеспечивает максимальную гибкость и разнообразие. Это позволяет производителю гарантировать индивидуальное решение для любой ситуации.
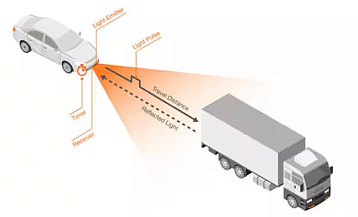
LiDAR в автомобильных системах
Перед проектировщиками все чаще встает задача разработки автомобильных систем LiDAR, которые обеспечивают измерения в режиме реального времени, отвечающим требованиям безопасности класса 1 IEC 60825-1. Полевые транзисторы GaN могут использоваться с различными лазерными диодами для получения наносекундной длительности импульса и высоких уровней пиковой мощности, необходимых для высокопроизводительных автомобильных лидаров.

IEC 60601-1-8 Руководство по проектированию аварийных сигналов медицинского оборудования
Существует множество проблем при проектировании медицинского оборудования, выходящих за рамки проектирования потребительского оборудования. Помимо высоких стандартов надежности, к оборудованию предъявляются строгие и специфические требования. Выход из строя медицинского оборудования в буквальном смысле является вопросом жизни и смерти.

Новая серия фотоэлектрических датчиков BOS 6K | Balluff
Датчики серии BOS 6K от компании Balluff состоят из кубических мини-датчиков, которые охватывают все важные принципы обнаружения и используют для этой цели различные источники света. Это новейшая серия приносит проверенные и совершенно новые функциональные принципы и технологии, которые находят еще больше применения в промышленности и производстве.
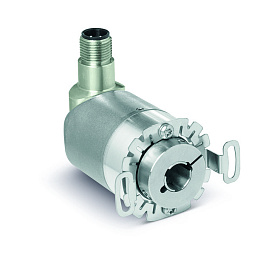
Абсолютный энкодер WH3600M | SIKO
Абсолютный угловой энкодер WH3600M с полым валом для мобильных машин. Используемые для точного измерения положения и скорости. Базируются на магнитном принципе измерения. Имеют внешний диаметр 36 мм, они чрезвычайно компактны.

Универсальные распределители от Bihl + Wiedemann: простая интеграция различных компонентов в ASi
Компания Bihl + Wiedemann предлагает решение таких вопросов как интеграция AS-интерфейс (ASi) в общую систему, подключение всех видов датчиков и исполнительных механизмов к ASi с использованием стандарта IP67

Решение для беспроводного программирования интеллектуального освещения от компании MEAN WELL- серия XLC/XLN-NFC
Для удовлетворить потребности клиентов, продукты MEAN WELL предлагают интеллектуальное решение для беспроводного программирования интеллектуального освещения с помощью технологию NFC (Near Field Communication).

IPF возвращает серию лазерных датчиков с диффузным отражением PT49
В течение многих лет лазерные датчики с диффузным отражением серии PT49 были постоянным элементом ассортимента продукции ipf. Однако весной 2022 года устройства пришлось снять с производства. В настоящее время IPF возвращает их.
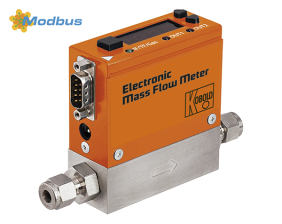
Тепловой массовый расходомер МАК компании KOBOLD
Серия MAK специально разработана для применений в газоизмерительной технике, где требуются максимальная гибкость, превосходная точность и высокая надежность.

Детектор утечек UYKS0001 и UYKS0002 от компании IPF
Сжатый воздух является ценным и дорогостоящим ресурсом, но во многих компаниях он снова и снова тратится впустую из-за утечек. Поскольку это приводит к высоким дополнительным ежегодным расходам, компания IPF предлагает решить эту проблему с помощью детектора утечек UYKS0001 или UYKS0002. Т.к до 42 процентов сжатого воздуха можно сэкономить, вовремя обнаружив и устранив утечки.

Управляющее устройство серии BN с технологией IO-Link компании Pizzato
Эволюция коммуникационных технологий открыла двери для новых решений в области промышленной автоматизации. Преимуществ BN с IO-Link - способность обнаруживать любые значения, выходящие за пределы допустимого диапазона, в контролируемых данных...

Компания Herga Technology обновляет свою продукцию в соответствии с медицинским допуском IEC 60601-1 Edition 3.2
IEC 60601-1 — это серия стандартов безопасности, которые охватывают безопасность и основные характеристики медицинского электрооборудования для обеспечения его эффективности и надежности в клиническом использовании.

К семейству SKiiP компании Semikron Danfoss скоро присоединится первый карбидокремниевый IPM.
Skip 4 SiC позволяет создавать мощные преобразователи для солнечной энергии и менее, экологически чистого водорода с меньшими общими затратами.

Устройство плавного пуска (УПП)
Электрические двигатели переменного тока с короткозамкнутым ротором отличаются простотой конструкции, невысокой стоимостью и являются самыми распространенными электрическими машинами. Однако, электродвигатели такого типа имеют недостатки, препятствующие их применению в ряде случаев.

MEAN WELL представила серию настенных адаптеров переменного тока нового поколения NGE30 / 45 / 65 / 90 мощностью от 30 Вт до 90 Вт.
Мировой лидер в области стандартных источников питания, компания MEAN WELL, представила новую серию энергосберегающих адаптеров со сменными вилками NGE30 / 45 / 65 / 90 мощностью от 30 Вт до 90 Вт.

Компания Balluff представила новое семейство продукта BIR (Balluff Inductive Rapid Positioning System)
Компания Balluff представила новое семейство продукта BIR (Balluff Inductive Rapid Positioning System), которое представляет собой новую индуктивную и чрезвычайно быструю систему измерения положения, включающую интеллектуальные функции. BIR впечатляет большим, регулируемым диапазоном измерений и особенно компактным, плоским корпусом с небольшими слепыми зонами...